


Leonardo’s robot, also known as Leonardo’s mechanical knight, was a humanoid automaton designed by the great engineer and painter of the renaissance period, Leonardo da Vinci.
This is one of Leonardo’s least-known designs and he probably developed it during his extensive studies and dissections of the human body.

{kind=link}
The schema was developed around the year 1495. However, it was rediscovered only in the 1950s (when Carlo Pedrettim, a professor from the University of California, suggested some of Leonardo’s designs could be for a robot).
Since the discovery of the sketchbook, the robot has been built faithfully based on Leonardo’s design and was found to be fully functional.

It is believed, that Leonardo demonstrated his “mechanical knight” in 1495 in Milano at a celebration hosted by Ludovico Sforza, perhaps at the wedding of his niece.
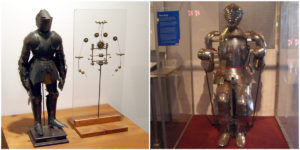
Basically, it is a warrior, clad in medieval armor that is capable of some human-like movements like sitting, opening and closing its arms, moving its head on flexible neck, and opening its visor. The entire automaton system was operated by a series of pulleys and cables.


It consisted of two working structures managing the upper and the lower parts of the knight’s body.
The upper half of the robotic knight was controlled by a four-factor system that controlled the movement of the shoulders, hands, elbows, and wrists; while the lower half was controlled by a tri-factor system (moving the hips, knees, legs and ankles).

{kind=link}
Further studies were carried out and in 2002, using several different da Vinci drawings as blueprints, roboticist Mark Elling Rosheim built a complete physical model of the robotic knight, which was able to walk and wave.
Rosheim also used da Vinci’s designs as inspiration for robots he developed for NASA. Models of the robotic knight have been constructed using his design and are on display at many museums.